все регионы
все регионыКонечные инструменты (EOAT)
")
Конечные инструменты (EOATs), также известные как конечные эффекторы, - это инструмент или оператор, предназначенные для взаимодействия с продуктом или процессом. Большинство EOAT - это захваты, которые поднимают и опускают предметы, используемые для перемещения или переориентации объектов. Захваты имеют различные методы обработки объектов и классифицируются как ударные (механические челюсти), захватывающие (иглы), астриктивные (вакуум и магнетизм) и смежные (адгезия). Инструменты также могут быть приспособлены для более специфических применений, таких как фрезерование и сварка.
Механические захваты: Они используются для базовых роботизированных систем сбора и размещения.Захваты имеют от одного до трех комплектов механических губок, которые обычно приводятся в действие серводвигателями или пневматическими приводами. Эти челюсти состоят из одной линии, которая соединена с запястьем вращающимся или призматическим шарниром. Для управления усилием захвата при использовании серводвигателей обратная связь генерируется тензодатчиками или током двигателя. Для захватов с пневматическими приводами усилие захвата может быть увеличено без повреждения изделия из-за присущей сжимаемости воздуха. Челюсти могут быть сконструированы в виде вилок, пальцев, параллельных пластин или поверхностей, повторяющих форму полезной нагрузки. Лучшее сцепление достигается за счет покрытия поверхностей эластичными материалами с высоким коэффициентом трения.
Механический захват
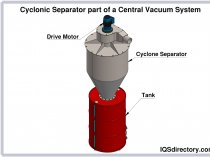
Вакуумные или присоски: они используются для сбора предметов с гладкой поверхностью, таких как пленки, стекло и пластины. Распространенным способом создания вакуума является использование трубки Вентури, снабжаемой сжатым воздухом. Для создания большей силы всасывания используется множество присосок. Вакуумные захваты более чистые, чем механические захваты, и могут допускать некоторое отклонение положения. Этот тип EOAT не подходит для шероховатых, пористых или неровных поверхностей. Кроме того, объект может выскользнуть из присоски при слишком быстром ускорении.
Вакуумный захват
Магнитные захваты: В этих типах EOATs используются электромагниты для подъема ферромагнитных предметов. Также используются постоянные магниты, поскольку они не потребляют энергию непрерывно. Однако для удаления собранного объекта требуется механическое устройство. Электромагниты предпочтительнее из-за их простого управления, поскольку объект можно поднять или опустить, просто подав или отключив питание на электромагнит. Однако, помимо ограничения ее использования на ферромагнитных материалах, она также приводит к тому, что детали становятся магнитными. Кроме того, ее нельзя ускорять слишком быстро, поскольку прикрепленный объект может соскользнуть.
Магнитный захват
Надувные хомуты и баллоны: Надувной хомут можно представить в виде эластомерной трубки с петлей, поддерживаемой жесткой конструкцией на внешней периферии. Она захватывает объект, расширяя трубку при отпускании, что делается путем сдувания. Они обычно используются для двумерного захвата трубчатых или цилиндрических изделий.
Надувные Ошейники
Захваты для игл: Эти типы выполняют захватное действие, проникая в предмет или объем с помощью игл или шипов. Эти EOAT обычно статичны без каких-либо подвижных звеньев соединений. Захваты для игл используются при работе с пористыми или волокнистыми предметами, такими как текстиль, углеродные и стеклянные волокна, где небольшие проколы не являются проблемой.
Захваты для игл
Адгезивные захваты: Как следует из названия, эти типы захватов захватывают продукт за счет поверхностной адгезии. Специальный тип клея наносится на поверхность прокладки или пластины, которая соприкасается с поднимаемым изделием. Основным преимуществом клеевых захватов является их способность работать без подачи воздуха или питания. Однако они ограничены в обращении с легкими предметами и, как правило, со временем теряют эффективность захвата.
Адгезивный Захват
Инструменты (постоянные и сменные): Инструменты могут быть установлены на крайнем конце запястья вместо захвата.Инструмент может быть постоянно прикреплен или сменный. Обычными инструментами для торцевых эффекторов являются отвертки, гаечные ключи, сверла, вращающиеся фрезы, лазеры, гидроабразивные форсунки, форсунки для распыления краски, сварочные электроды и припои. Другие специализированные конечные устройства включают в себя системы контроля с установленными датчиками. Примером этого может служить камера или другой тип оптического устройства, которое используется для бесконтактного тестирования и 3D-измерений. Результирующие измерения являются точными с точностью до десятых долей миллиметра благодаря свойственной роботизированным системам повторяемости, точности и точности.
Существующие инструменты, установленные на роботизированной руке, также могут со временем меняться в связи с изменениями, вызванными новыми требованиями к продукту, усовершенствованиями системы или устареванием деталей. При принятии решения о применимости нового инструмента необходимо проверить несколько факторов:
Вес нового инструмента;
Точность позиционирования и угла при совмещении с обрабатываемой деталью;
Усилие и крутящий момент, создаваемые инструментом;
Требования к жесткости;
Переходные, соединительные и быстроразъемные механизмы;
Управление с обратной связью и установленные датчики;
Вспомогательные системные требования.
Антропоморфные и адаптивные захваты: По сравнению с механическими захватами, антропоморфные захваты имеют более сложные соединения и соединения.Механические захваты обычно имеют одно звено, соединенное с запястьем поворотным или призматическим шарниром. Антропоморфные захваты, с другой стороны, имеют два или более звеньев, соединенных между собой поворотными шарнирами. Они могут быть сконфигурированы для обеспечения двух- или трехмерного захвата с помощью двух или трех наборов пальцев. Для обеспечения адаптивности каждый палец приводится в действие независимо с помощью установленных датчиков для контроля приближения и силы захвата. Антропоморфные и адаптивные захваты полезны в тех случаях, когда объекты часто меняются, например, в системах сортировки и упаковки нескольких продуктовых линеек.
- Статью добавил пользователь
- Категория
- Дата размещения 30.08.2022, просмотров 27